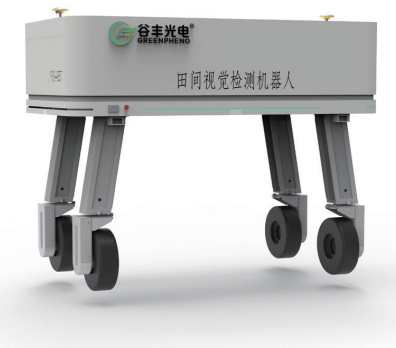
田间视觉检测机器人
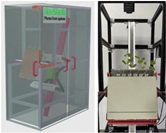
田间视觉检测机器人作为衔接田间高通量表型与三维形态解析的移动化采集装备,其核心在于将多视角视觉传感系统、自适应升降结构与高通过性移动底盘无缝集成于一个刚性稳固的框架平台上。用户设定巡检路径后,机器人即可自主或遥控完成对作物冠层的多角度图像采集与三维点云重建,实现对植株群体的原位、无损测量。
通过其多模态视觉融合能力(RGB+ 深度感知)、灵活的视点调节机制以及田间自主移动平台,该机器人实现了对传统人工田间调查的根本性变革,将难以大规模获取的作物生长状态转化为精准、可追溯的数字表型数据。因此,它不仅是静态表型采集的重要补充,更是进行冠层生长监测、群体结构分析、逆境响应评估及田间育种高通量筛选的核心工具,极大地推动了植物表型组学从实验室走向实际生产环境的场景拓展。该系统通过集成 RGB 成像与 iTOF 深度感知技术,可同步获取作物的色彩纹理信息(如叶色变化、病斑识别)与三维结构参数(如株高、冠层覆盖度),并支持对同一区域进行长期动态监测(如冠层生长曲线分析、倒伏监测):其移动式原位检测模式保障了数据的时空一致性,适用于大田作物长势监测、育种材料群体表型筛査(如株高、整齐度、抗倒性评估)、生物与非生物胁迫田间响应(如病虫害空间分布、干旱胁迫下冠层温度模拟)、精准农业管理决策(如肥力差异区识别),以及作为连接无人机遥感与地面定点观测的关键桥梁,为构建“群体-个体”多尺度表型解析网络提供了可靠的移动化采集装备,推动了智慧农业从静态抽样向动态全息监测的技术跨越。
功能特性
全向移动与高通过性底盘:机器人底盘采用碳钢支架与螺钉刚性连接,通过八个电机独立驱动四个支撑腿的 360°旋转与四个轮子的行进,形成全向移动平台。此结构能灵活适应田埂、沟渠等复杂地形,,为成像模块提供稳定、可靠的移动基座。
全自动、多维度视觉采集:集成三组二级电缸驱动的升降系统,通过程序精准控制 RGB 相机与深度相机的拍摄高度,无需人工干预即可实现作物冠层的多高度图像序列自动捕捉,适应不同生长周期的高度变化。
原位无损测量:采用多传感器融合技术,通过 RGB 相机获取高清色彩纹理同步利用深度相机捕捉空间信息,实现对作物群体表型(如株高、冠层覆盖度)的非接触式测量,全程不损伤植株自然生长状态。
多尺度解析与自适应观测:凭借可调节的拍摄高度与双模态视觉系统,机器人能够根据作物生长阶段灵活切换观测尺度,实现从田间群体长势概览(如作物均匀度)到单株个体精细测量(如果穗识别)的无缝衔接与数据关联。
RTK 高精度自主导航:机器人搭载 RTK-GNSS 高精度定位系统,能够基于预设路径在田间实现厘米级精度的自动巡线行驶与定点采集;通过融合轮腿组合的运动控制算法,在执行任务过程中具备基础的路径跟踪与纠偏能力,有效保障了大规模田间表型数据采集的自动化与可重复性。
系统构成
田间视觉检测机器人主要由移动平台单元、表型图像信息采集模块与图像数据处理单元三部分组成。
 移动平台单元
移动平台单元
主体由高刚性碳钢底盘框架、独立轮腿复合机构、电机驱动系统、RTK-GNSS 天线及防护外壳等组成,为机器人田间自主作业与数据采集提供稳定、可靠的移动基础。
平台单元内部集成以下核心模块
碳钢底盘与轮腿复合机构:通过碳钢支架与螺钉的刚性连接为所有设备提供稳固安装基础:独特的轮腿复合设计(四轮四腿,共八个电机独立驱动)兼具轮式移动效率与腿式结构越障能力,可灵活应对田埂、沟渠等不规则地形。
全向独立驱动系统:通过八个电机分别精确控制四个支撑腿的 360°旋转与四个轮子的行进,实现平台的全向移动、原地转向与灵活避障,为在密集作物行间穿行和精确点位停靠提供根本保障。
RTK 高精度导航定位系统:通过接收实时差分卫星信号,为机器人在开阔田间提供厘米级的绝对定位信息,使其能够严格按照预设路径进行自动巡线行驶与定点数据采集。
多级升降与稳定支撑结构:由三组二级电缸组成的升降系统精准调节上方成像模块的高度与水平姿态,即使在轻微不平整地面也能确保成像模块的稳定,为获取高质量图像数据提供必要条件。
多模态视觉成像系统:集成高分辨率 RGB相机与双目深度相机,形成协同采集单元。RGB 相机负责获取作物冠层的高清色彩纹理信息(如叶色、病斑),而双目深度相机通过立体视觉计算生成密集点云数据,同步获取作物的三维几何信息(如株高冠层体积),实现作物表型 2D 视觉特征与 3D 空间结构参数的一体化采集。
田间作业控制单元:集成了工业级嵌入式计算机、运动控制器及数据存储设备,通过定制化软件系统统一调度机器人的移动导航、传感器采集与数据预处理,实现从路径规划、自动巡测到数据回传的全流程智能化作业。
技术参数
 表型图像信息采集模组
表型图像信息采集模组
表型图像信息采集模块主要由多级电缸升降机构与刚性安装支架组成的位姿调节单元和多模态视觉成像系统组成,包含精密升降平台、RGB相机和深度视觉传感器。
技术参数
 图像数据处理单元
图像数据处理单元
该软件系统作为田间视觉检测机器人的智能控制与数据处理中枢,集成了导航控制、三维重建与表型解析三大功能模块。系统通过深度相机实时感知田间地形与障碍物信息,结合RTK高精度定位,实现机器人的自主路径规划与稳定导航;同时协调 RGB 相机与另外两台深度相机同步采集作物冠层数据,运用点云融合与深度学习算法,构建精细的作物三维模型。系统能够自动提取株高、冠层覆盖度、叶面积指数等关键表型参数,并识别倒伏、病虫害等生长异常,为精准农业管理和大规模育种筛选提供全面的数据支持。
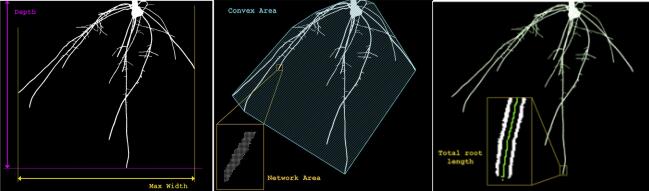
主要提取性状参数I-trait(以种子为例)

bio-equip.com

 10
10
 12
12